|
|

|

|
| e-Pub |
Section: New Results
Recognition in video
Beat-Event Detection in Action Movie Franchises
Participants : Danila Potapov, Matthijs Douze, Jerome Revaud, Zaid Harchaoui, Cordelia Schmid.
While important advances were recently made towards temporally localizing and recognizing specific human actions or activities in videos, efficient detection and classification of long video chunks belonging to semantically-defined categories such as “pursuit” or “romance” remains challenging.
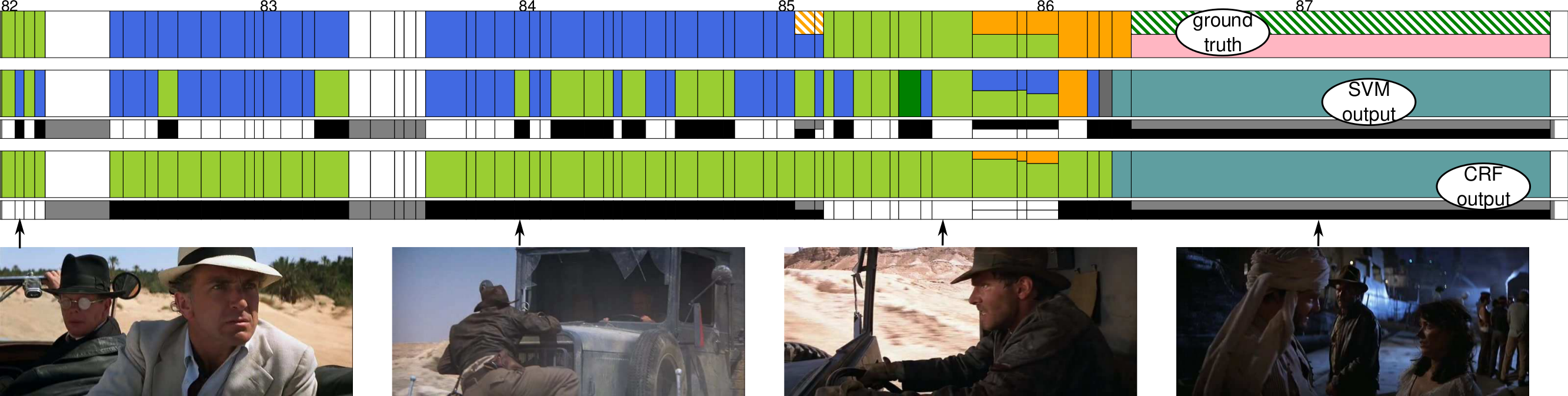
In our work [30] , we introduce a new dataset, Action Movie Franchises, consisting of a collection of Hollywood action movie franchises. We define 11 non-exclusive semantic categories — called beat-categories — that are broad enough to cover most of the movie footage. The corresponding beat-events are annotated as groups of video shots, possibly overlapping. We propose an approach for localizing beat-events based on classifying shots into beat-categories and learning the temporal constraints between shots, as shown in Figure 8 . We show that temporal constraints significantly improve the classification performance. We set up an evaluation protocol for beat-event localization as well as for shot classification, depending on whether movies from the same franchise are present or not in the training data.
|
EpicFlow: Edge-Preserving Interpolation of Correspondences for Optical Flow
Participants : Jerome Revaud, Philippe Weinzaepfel, Zaid Harchaoui, Cordelia Schmid.
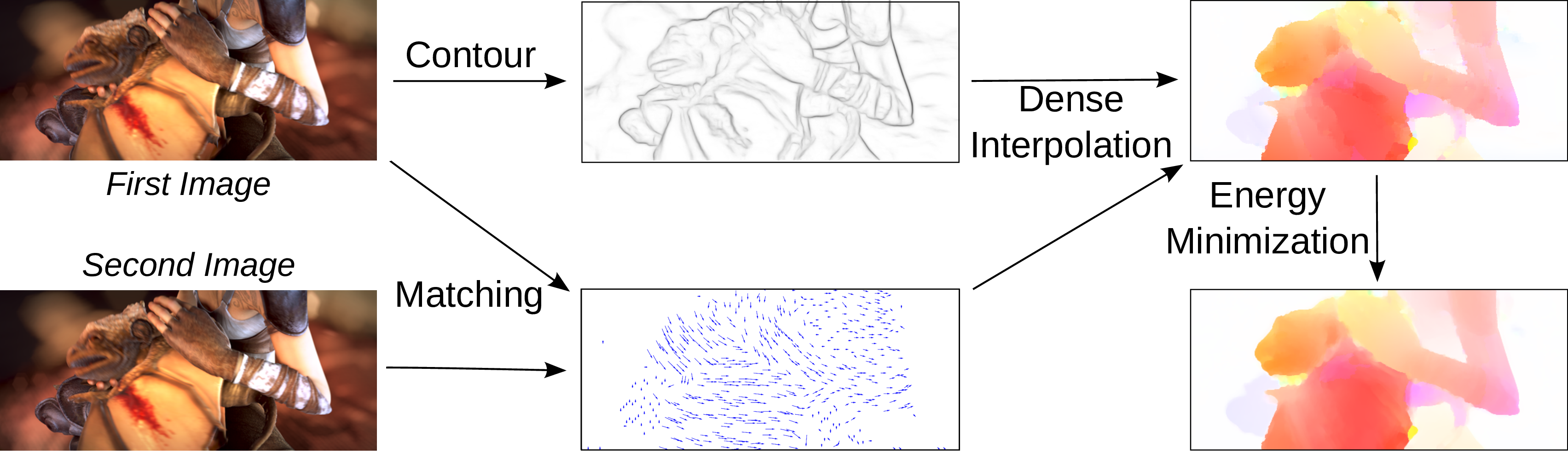
In this paper [18] , we propose a novel approach for optical flow estimation, targeted at large displacements with significant occlusions. It consists of two steps: i) dense matching by edge-preserving interpolation from a sparse set of matches; ii) variational energy minimization initialized with the dense matches. The sparse-to-dense interpolation relies on an appropriate choice of the distance, namely an edge-aware geodesic distance. This distance is tailored to handle occlusions and motion boundaries – two common and difficult issues for optical flow computation. We also propose an approximation scheme for the geodesic distance to allow fast computation without loss of performance. Subsequent to the dense interpolation step, standard one-level variational energy minimization is carried out on the dense matches to obtain the final flow estimation. The proposed approach, called Edge-Preserving Interpolation of Correspondences (EpicFlow) is fast and robust to large displacements. An overview is given in Figure 9 . EpicFlow significantly outperforms the state of the art on MPI-Sintel and performs on par on Kitti and Middlebury.
|
DeepMatching: Hierarchical Deformable Dense Matching
Participants : Jerome Revaud, Philippe Weinzaepfel, Zaid Harchaoui, Cordelia Schmid.
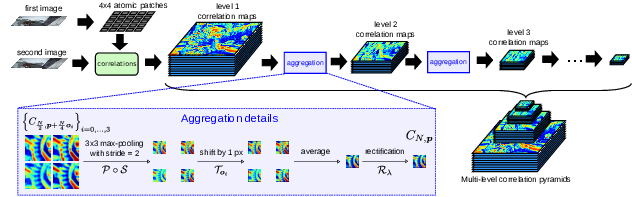
In this paper [31] , we introduce a novel matching algorithm, called DeepMatching, to compute dense correspondences between images. DeepMatching relies on a hierarchical, multi-layer, correlational architecture designed for matching images and was inspired by deep convolutional approaches, see Figure 10 . The proposed matching algorithm can handle non-rigid deformations and repetitive textures and efficiently determines dense correspondences in the presence of significant changes between images. We evaluate the performance of DeepMatching, in comparison with state-of-the-art matching algorithms, on the Mikolajczyk, the MPI-Sintel and the Kitti datasets. DeepMatching outperforms the state-of-the-art algorithms and shows excellent results in particular for repetitive textures. We also propose a method for estimating optical flow, called DeepFlow, by integrating DeepMatching in the large displacement optical flow (LDOF) approach of Brox et al. Compared to existing matching algorithms, additional robustness to large displacements and complex motion is obtained thanks to our matching approach. DeepFlow obtains competitive performance on public benchmarks for optical flow estimation.
|
Learning to Detect Motion Boundaries
Participants : Philippe Weinzaepfel, Jerome Revaud, Zaid Harchaoui, Cordelia Schmid.
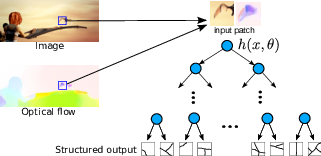
In this paper [23] , we propose a learning-based approach for motion boundary detection. Precise localization of motion boundaries is essential for the success of optical flow estimation, as motion boundaries correspond to discontinuities of the optical flow field. The proposed approach allows to predict motion boundaries, using a structured random forest trained on the ground-truth of the MPI-Sintel dataset, see Figure 11 . The random forest leverages several cues at the patch level, namely appearance (RGB color) and motion cues (optical flow estimated by state-of-the-art algorithms). Experimental results show that the proposed approach is both robust and computationally efficient. It significantly outperforms state-of-the-art motion-difference approaches on the MPI-Sintel and Middlebury datasets. We compare the results obtained with several state-of-the-art optical flow approaches and study the impact of the different cues used in the random forest. Furthermore, we introduce a new dataset, the YouTube Motion Boundaries dataset (YMB), that comprises 60 sequences taken from real-world videos with manually annotated motion boundaries. On this dataset, our approach, although trained on MPI-Sintel, also outperforms by a large margin state-of-the-art optical flow algorithms.
|
Learning to track for spatio-temporal action localization
Participants : Philippe Weinzaepfel, Zaid Harchaoui, Cordelia Schmid.
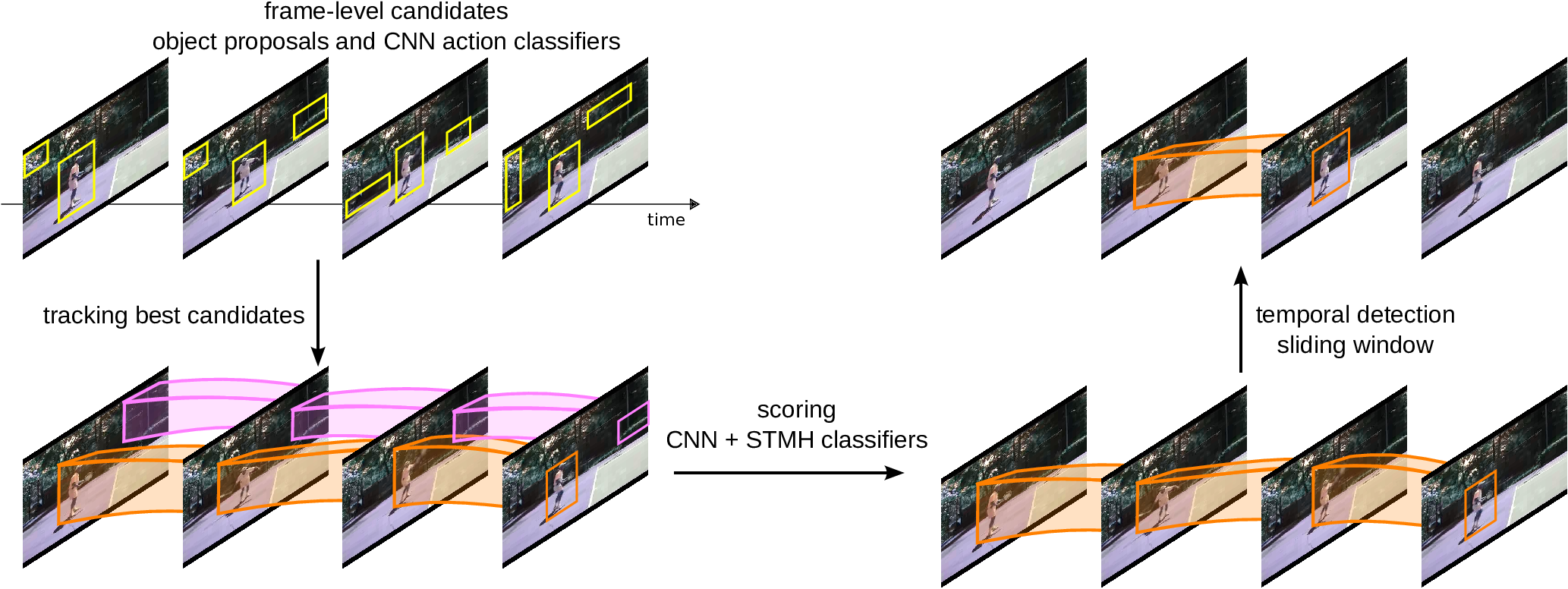
In this paper [22] , we propose an effective approach for spatio-temporal action localization in realistic videos. The approach first detects proposals at the frame-level and scores them with a combination of static and motion CNN features. It then tracks high-scoring proposals throughout the video using a tracking-by-detection approach. Our tracker relies simultaneously on instance-level and class-level detectors. The tracks are scored using a spatio-temporal motion histogram, a descriptor at the track level, in combination with the CNN features. Finally, we perform temporal localization of the action using a sliding-window approach at the track level. An overview of our approach is given in Figure 12 . We present experimental results for spatio-temporal localization on the UCF-Sports, J-HMDB and UCF-101 action localization datasets, where our approach outperforms the state of the art with a margin of 15%, 7% and 12% respectively in mAP.
|
A robust and efficient video representation for action recognition
Participants : Heng Wang, Dan Oneata, Cordelia Schmid, Jakob Verbeek.
In [9] we present a state-of-the-art video representation and apply it to efficient action recognition and detection. We first propose to improve the popular dense trajectory features by explicit camera motion estimation. Local feature trajectories consistent with the homography are considered as due to camera motion, and thus removed. This results in significant improvement on motion-based HOF and MBH descriptors. We further explore the recent Fisher vector as an alternative feature encoding approach to the standard bag-of-words histogram, and consider different ways to include spatial layout information in these encodings. We present a large and varied set of evaluations, considering (i) classification of short basic actions on six datasets, (ii) localization of such actions in featurelength movies, and (iii) large-scale recognition of complex events. We find that our improved trajectory features significantly outperform previous dense trajectories, and that Fisher vectors are superior to bag-of-words encodings for video recognition tasks. In all three tasks, we show substantial improvements over the state-of-the-art results. This journal paper combines and extends earlier conference papers.
Circulant temporal encoding for video retrieval and temporal alignment
Participants : Jerome Revaud, Matthijs Douze, Hervé Jégou [Inria Rennes, Facebook AI Research] , Cordelia Schmid, Jakob Verbeek.
In [6] we address the problem of specific video event retrieval. Given a query video of a specific event, e.g., a concert of Madonna, the goal is to retrieve other videos of the same event that temporally overlap with the query. Our approach encodes the frame descriptors of a video to jointly represent their appearance and temporal order. It exploits the properties of circulant matrices to efficiently compare the videos in the frequency domain. This offers a significant gain in complexity and accurately localizes the matching parts of videos. The descriptors can be compressed in the frequency domain with a product quantizer adapted to complex numbers. In this case, video retrieval is performed without decompressing the descriptors. The second problem we consider is the temporal alignment of a set of videos. We exploit the matching confidence and an estimate of the temporal offset computed for all pairs of videos by our retrieval approach. Our robust algorithm aligns the videos on a global timeline by maximizing the set of temporally consistent matches. The global temporal alignment enables synchronous playback of the videos of a given scene. This journal paper extends an earlier conference paper.
Pose Estimation and Segmentation of Multiple People in Stereoscopic Movies
Participants : Guillaume Seguin [Willow] , Karteek Alahari, Josef Sivic [Willow] , Ivan Laptev [Willow] .
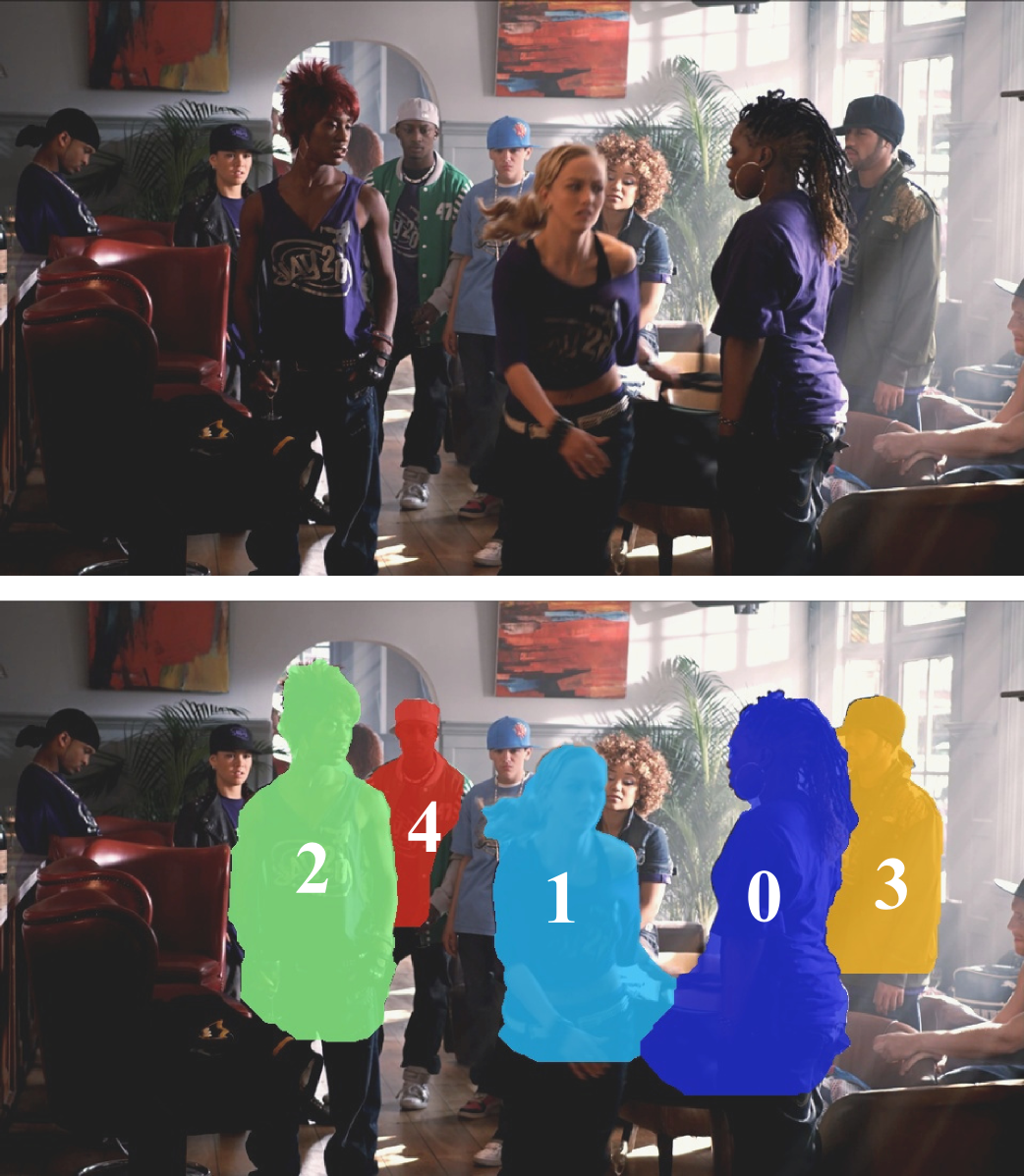
The work in [8] presents a method to obtain a pixel-wise segmentation and pose estimation of multiple people in stereoscopic videos, as shown in Figure 13 . This task involves challenges such as dealing with unconstrained stereoscopic video, non-stationary cameras, and complex indoor and outdoor dynamic scenes with multiple people. We cast the problem as a discrete labelling task involving multiple person labels, devise a suitable cost function, and optimize it efficiently. The contributions of our work are two-fold: First, we develop a segmentation model incorporating person detections and learnt articulated pose segmentation masks, as well as colour, motion, and stereo disparity cues. The model also explicitly represents depth ordering and occlusion. Second, we introduce a stereoscopic dataset with frames extracted from feature-length movies “StreetDance 3D" and “Pina". The dataset contains 587 annotated human poses, 1158 bounding box annotations and 686 pixel-wise segmentations of people. The dataset is composed of indoor and outdoor scenes depicting multiple people with frequent occlusions. We demonstrate results on our new challenging dataset, as well as on the H2view dataset from (Sheasby et al. ACCV 2012).
|
Encoding Feature Maps of CNNs for Action Recognition
Participants : Xiaojiang Peng, Cordelia Schmid.
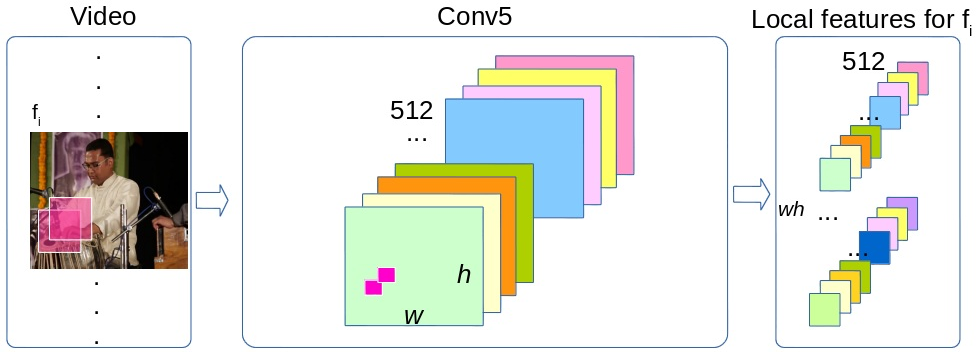
In [29] We describe our approach for action classification in the THUMOS Challenge 2015. Our approach is based on two types of features, improved dense trajectories and CNN features, as illustrated in Figure 14 . For trajectory features, we extract HOG, HOF, MBHx, and MBHy descriptors and apply Fisher vector encoding. For CNN features, we utilize a recent deep CNN model, VGG19, to capture appearance features and use VLAD encoding to encode/pool convolutional feature maps which shows better performance than average pooling of feature maps and full-connected activation features.
|
Online Object Tracking with Proposal Selection
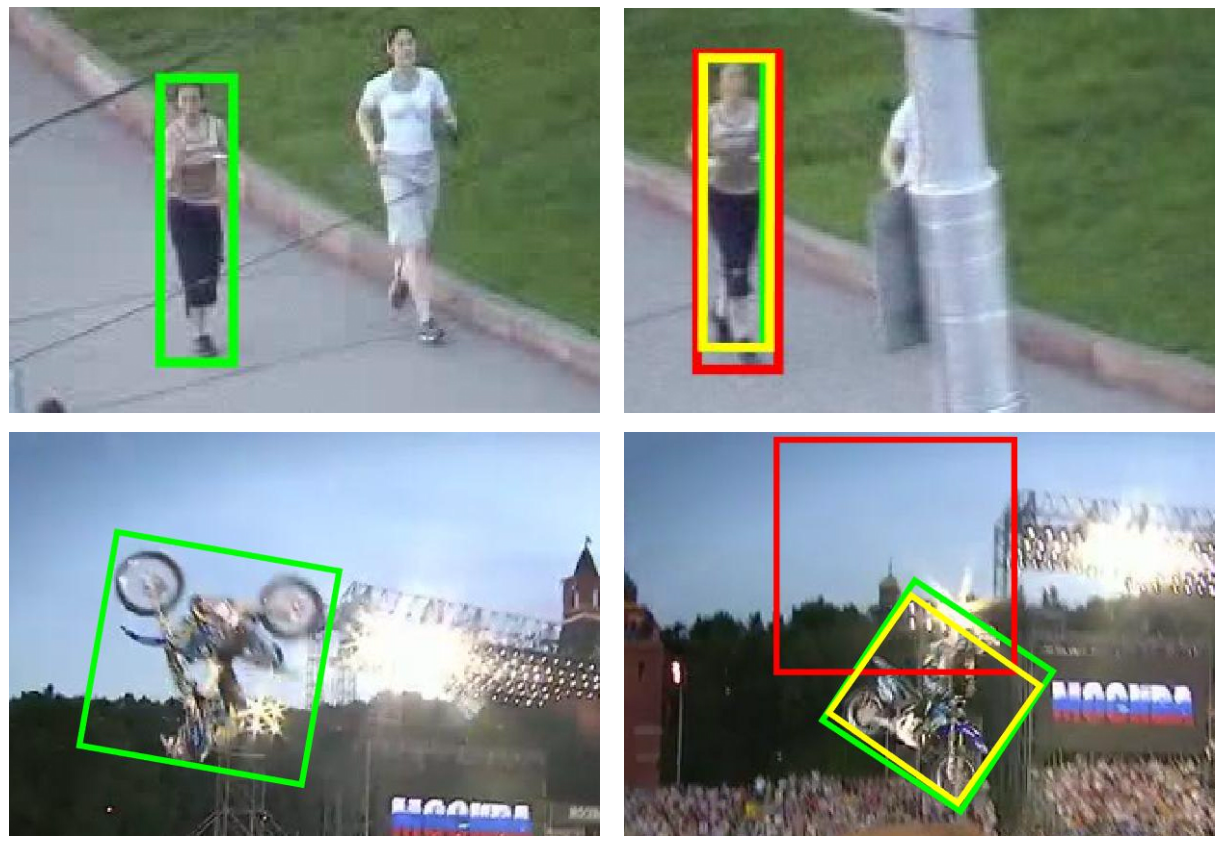
Participants : Yang Hua, Karteek Alahari, Cordelia Schmid.
Tracking-by-detection approaches are some of the most successful object trackers in recent years. Their success is largely determined by the detector model they learn initially and then update over time. However, under challenging conditions where an object can undergo transformations, e.g., severe rotation, these methods are found to be lacking. In [14] , we address this problem by formulating it as a proposal selection task and making two contributions. The first one is introducing novel proposals estimated from the geometric transformations undergone by the object, and building a rich candidate set for predicting the object location. The second one is devising a novel selection strategy using multiple cues, i.e., detection score and edgeness score computed from state-of-the-art object edges and motion boundaries. We extensively evaluate our approach on the visual object tracking 2014 challenge and online tracking benchmark datasets, and show the best performance. Sample results are shown in Figure 15 . Our tracker based on this method has recently won the visual object tracking challenge (VOT-TIR) organized as part of ICCV 2015 in Santiago, Chile.
|